




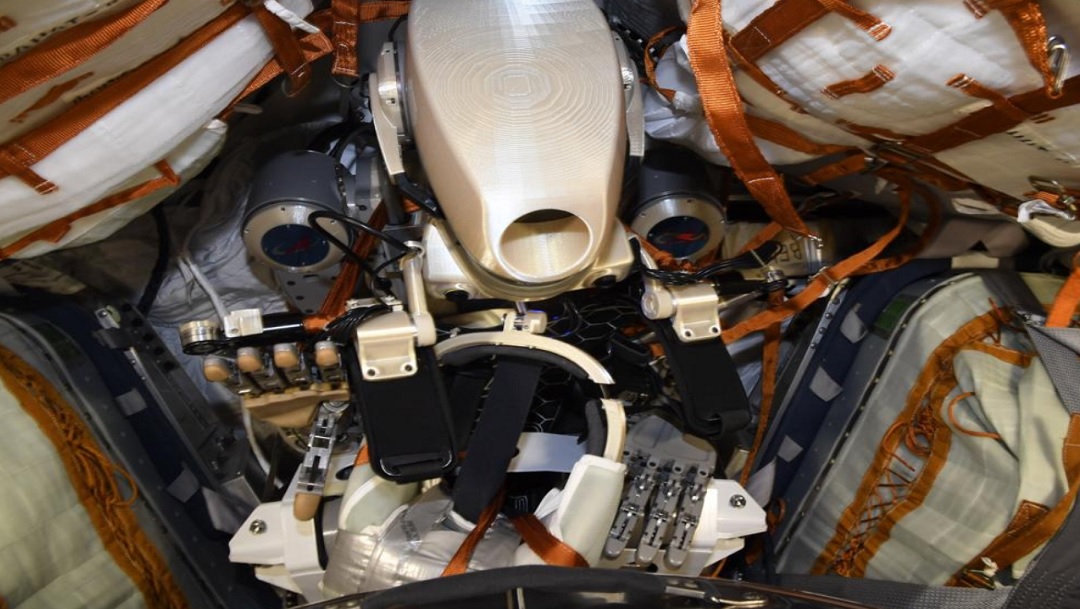
La nave rusa Soyuz MS-14 con el androide “Fiódor” como único ocupante aterrizó en la estepa kazaja sin novedad, informó Roscosmos, la agencia espacial de Rusia, en su cuenta de Twitter.
Te recomendamos: Cápsula Dragon de SpaceX se acopla a la Estación Espacial Internacional
El aterrizaje se produjo a las 00.32 hora de Moscú (21.32 GMT del viernes), poco más de tres horas después de que la nave abandonara la Estación Espacial Internacional a la que permaneció enganchada durante once días.

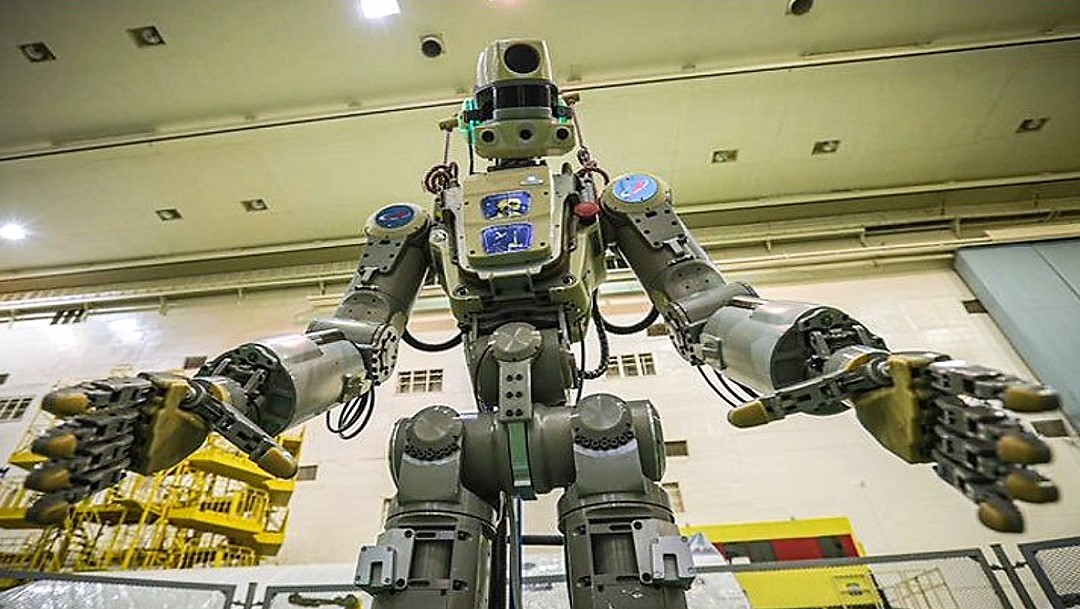
El robot, Skybot-F850 o FEDOR, por sus siglas en inglés (Final Experimental Demonstration Object Research), que la prensa del país llama “Fiódor” por su similitud con el nombre ruso, permaneció en el espacio un total de 17 días.
The #SoyuzMS14 spacecraft descent module carrying #SkybotF850 humanoid robot successfully landed.
All the reentry and landing operations went as expected! pic.twitter.com/wf7gyzdJmx
— РОСКОСМОС (@roscosmos) September 6, 2019
El androide fue elegido para ensayar el cohete Soyuz2.1 como portador de las naves tripuladas Soyuz, que hasta ahora habían sido lanzadas con cohetes Soyuz-FG, dotados de un sistema de mando analógico de fabricación ucraniana.

La andadura especial de “Fiódor” no estuvo exenta de contratiempos: la Soyuz MS-14 solo consiguió acoplarse a la EEI al segundo intento, el pasado 27 de agosto, dos días después de lo previsto, debido a un desperfecto en el sistema automático de enganche en el puerto del segmento ruso.
“Mis disculpas por el retraso. Me quedé atrapado en un atasco. Estoy preparado para proseguir con el trabajo”, escribió el androide en su cuenta de Twitter, donde tiene más de 8 mil seguidores.
Los desarrolladores de “Fiódor” quedaron satisfechos con su cometido en el espacio, donde los cosmonautas rusos que se encuentran en la plataforma orbital experimentaron para mejorar su motricidad.

El próximo vuelo del androide, sin fecha aún, se estudiará su control remoto tanto desde la EEI como desde la Tierra, indicó el jefe del programa de robótica espacial de la empresa Androidnaya Tekhnika, Ígor Sozin, al estudio de televisión de Roscosmos.
The #SoyuzMS14 main parachute system deployment. The descent module is planned to land at 21:34 UTC. pic.twitter.com/nOILBC2xnR
— РОСКОСМОС (@roscosmos) September 6, 2019
Según el especialista, el mando remoto del robot es de gran importancia en caso de averías en estaciones espaciales y en las futuras bases en la Luna.
Además, el androide realizará una serie de operaciones a bordo de la EEI.
“Finalmente, (…) será sacado fuera de estación, al espacio abierto, para realizar algún tipo de actividad, que es para lo que se ha creado”, dijo Sozin.
Con información de EFE.
LLH
